diff options
Diffstat (limited to 'keyboards/3w6')
22 files changed, 1456 insertions, 0 deletions
diff --git a/keyboards/3w6/info.json b/keyboards/3w6/info.json new file mode 100644 index 0000000000..5a0e9be2f4 --- /dev/null +++ b/keyboards/3w6/info.json @@ -0,0 +1,56 @@ +{ + "keyboard_name": "3w6", + "url": "https://github.com/weteor/3W6/", + "maintainer": "weteor", + "width": 13, + "height": 5, + "layouts": { + "LAYOUT": { + "layout": [ + {"label": "k00", "x": 0, "y": 0.8}, + {"label": "k01", "x": 1, "y": 0.2}, + {"label": "k02", "x": 2, "y": 0}, + {"label": "k03", "x": 3, "y": 0.2}, + {"label": "k04", "x": 4, "y": 0.4}, + + {"label": "k05", "x": 8, "y": 0.4}, + {"label": "k06", "x": 9, "y": 0.2}, + {"label": "k07", "x": 10, "y": 0}, + {"label": "k08", "x": 11, "y": 0.2}, + {"label": "k09", "x": 12, "y": 0.8}, + + {"label": "k10", "x": 0, "y": 1.8}, + {"label": "k11", "x": 1, "y": 1.2}, + {"label": "k12", "x": 2, "y": 1}, + {"label": "k13", "x": 3, "y": 1.2}, + {"label": "k14", "x": 4, "y": 1.4}, + + {"label": "k15", "x": 8, "y": 1.4}, + {"label": "k16", "x": 9, "y": 1.2}, + {"label": "k17", "x": 10, "y": 1}, + {"label": "k18", "x": 11, "y": 1.2}, + {"label": "k19", "x": 12, "y": 1.8}, + + {"label": "k20", "x": 0, "y": 2.8}, + {"label": "k21", "x": 1, "y": 2.2}, + {"label": "k22", "x": 2, "y": 2}, + {"label": "k23", "x": 3, "y": 2.2}, + {"label": "k24", "x": 4, "y": 2.4}, + + {"label": "k25", "x": 8, "y": 2.4}, + {"label": "k26", "x": 9, "y": 2.2}, + {"label": "k27", "x": 10, "y": 2}, + {"label": "k28", "x": 11, "y": 2.2}, + {"label": "k29", "x": 12, "y": 2.8}, + + {"label": "k32", "x": 3.2, "y": 3.6}, + {"label": "k33", "x": 4.2, "y": 3.6}, + {"label": "k34", "x": 5.2, "y": 3.8}, + + {"label": "k35", "x": 6.8, "y": 3.8}, + {"label": "k36", "x": 7.8, "y": 3.6}, + {"label": "k37", "x": 8.8, "y": 3.6} + ] + } + } +} diff --git a/keyboards/3w6/keymaps/default/keymap.c b/keyboards/3w6/keymaps/default/keymap.c new file mode 100644 index 0000000000..029173b674 --- /dev/null +++ b/keyboards/3w6/keymaps/default/keymap.c @@ -0,0 +1,69 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#include QMK_KEYBOARD_H + +enum layers +{ + _ALPHA_QWERTY = 0, + _ALPHA_COLEMAK, + _SYM, + _NAV, + _NUM, + _CFG, +}; + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + + + [_ALPHA_QWERTY] = LAYOUT( + KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, + KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, + LSFT_T(KC_Z), KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, RSFT_T(KC_SLSH), + + LCTL_T(KC_ESC), LT(_NUM,KC_SPC), LT(_NAV, KC_TAB), LT(_SYM, KC_BSPC), KC_ENT, LALT_T(KC_DEL) + ), + [_ALPHA_COLEMAK] = LAYOUT( + KC_Q, KC_W, KC_F, KC_P, KC_G, KC_J, KC_L, KC_U, KC_Y, KC_QUOT, + KC_A, KC_R, KC_S, KC_T, KC_D, KC_H, KC_N, KC_E, KC_I, KC_O, + LSFT_T(KC_Z), KC_X, KC_C, KC_V, KC_B, KC_K, KC_M, KC_COMM, KC_DOT, RSFT_T(KC_SCLN), + LCTL_T(KC_ENT), LT(_NUM,KC_SPC), LT(_NAV, KC_TAB), LT(_SYM, KC_BSPC), KC_ENT, LALT_T(KC_DEL) + ), + [_SYM] = LAYOUT( + KC_GRV , KC_CIRC, KC_AT, KC_DLR, KC_TILD, KC_AMPR, KC_EXLM, KC_PIPE, KC_UNDS, KC_HASH, + KC_SLSH, KC_LBRC, KC_LCBR, KC_LPRN, KC_EQL, KC_ASTR, KC_RPRN, KC_RCBR, KC_RBRC, KC_BSLS, + _______, KC_QUES, KC_PLUS, KC_PERC, XXXXXXX, XXXXXXX, XXXXXXX, KC_MINS, XXXXXXX, _______, + XXXXXXX, MO(_CFG), XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX + ), + [_NAV] = LAYOUT( + XXXXXXX, KC_VOLD, KC_MUTE, KC_VOLU, XXXXXXX, XXXXXXX, KC_PGDN, KC_UP, KC_PGUP, KC_DEL, + KC_MPRV, KC_MPLY, KC_MSTP, KC_MNXT, XXXXXXX, KC_HOME, KC_LEFT, KC_DOWN, KC_RGHT, KC_END, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, MO(_CFG), XXXXXXX + ), + [_NUM] = LAYOUT( + XXXXXXX, KC_F9, KC_F10, KC_F11, KC_F12, KC_PPLS, KC_P7, KC_P8, KC_P9, KC_PSLS, + XXXXXXX, KC_F5, KC_F6, KC_F7, KC_F8, KC_P0, KC_P4, KC_P5, KC_P6, KC_PDOT, + XXXXXXX, KC_F1, KC_F2, KC_F3, KC_F4, KC_PMNS, KC_P1, KC_P2, KC_P3, KC_PAST, + XXXXXXX, XXXXXXX, XXXXXXX, KC_PEQL, KC_PENT, XXXXXXX + ), + [_CFG] = LAYOUT( + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,DF(_ALPHA_QWERTY), DF(_ALPHA_COLEMAK), + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX + ), +}; diff --git a/keyboards/3w6/keymaps/manna-harbour_miryoku/config.h b/keyboards/3w6/keymaps/manna-harbour_miryoku/config.h new file mode 100644 index 0000000000..fb567ad7d3 --- /dev/null +++ b/keyboards/3w6/keymaps/manna-harbour_miryoku/config.h @@ -0,0 +1,32 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +// generated from users/manna-harbour_miryoku/miryoku.org -*- buffer-read-only: t -*- + +#pragma once + +#define LAYOUT_miryoku( \ + K00, K01, K02, K03, K04, K05, K06, K07, K08, K09, \ + K10, K11, K12, K13, K14, K15, K16, K17, K18, K19, \ + K20, K21, K22, K23, K24, K25, K26, K27, K28, K29, \ + N30, N31, K32, K33, K34, K35, K36, K37, N38, N39 \ +) \ +LAYOUT( \ +K00, K01, K02, K03, K04, K05, K06, K07, K08, K09, \ +K10, K11, K12, K13, K14, K15, K16, K17, K18, K19, \ +K20, K21, K22, K23, K24, K25, K26, K27, K28, K29, \ + K32, K33, K34, K35, K36, K37 \ +) diff --git a/keyboards/3w6/keymaps/manna-harbour_miryoku/keymap.c b/keyboards/3w6/keymaps/manna-harbour_miryoku/keymap.c new file mode 100644 index 0000000000..74df5e0fe1 --- /dev/null +++ b/keyboards/3w6/keymaps/manna-harbour_miryoku/keymap.c @@ -0,0 +1,17 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +// generated from users/manna-harbour_miryoku/miryoku.org -*- buffer-read-only: t -*- diff --git a/keyboards/3w6/readme.md b/keyboards/3w6/readme.md new file mode 100644 index 0000000000..5878376bde --- /dev/null +++ b/keyboards/3w6/readme.md @@ -0,0 +1,45 @@ +# 3W6 + + + +The 3w6 is a low profile, split ortholinear keyboard with 36 keys. + +I needed a keyboard for work and wasn't really satisfied with the available alternatives (namely Corne, Kyria and Ferris), mostly because they are either rather large and/or don't have the spacing I would like. + +The 3w6 is designed to be a simple, realiable, cheap and small keyboard to be taken everywhere. + +There are currently two revisions: +* Rev1: + - onboard microcontroller (ATMega32U4) + - USB-C connector Board <-> PC + - USB-C connectors between both split halfs + - choc spacing (18x17mm) + - aggressive pinky stagger + - support for Choc V1 switches +* Rev2: + - everything Rev1 did + - additional middle plate (2mm) + - support for [Pimoroni Trackball](https://shop.pimoroni.com/products/trackball-breakout) instead of outer thumb switch on right half, needs midplate + - mounting holes for [Tenting Puck](https://splitkb.com/collections/keyboard-parts/products/tenting-puck), only usable without mid or switchplate + +--- + +* Keyboard Maintainer: [weteor](https://github.com/weteor) +* Hardware Supported: + * 3w6 rev1 + * 3w6 rev2 (with Pimoroni support) +* Hardware Availability: + * make one yourself: [Design and Productionfiles](https://github.com/weteor/3w6) + * maintainer is selling kits when available +--- +To reach the bootloader, connect the board to the PC and push the reset button on left half. + +Make examples for this keyboard (after setting up your build environment): + + make 3w6/rev1:default + make 3w6/rev2:default + make 3w6/rev2:default_pimoroni + + --- + +See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs). diff --git a/keyboards/3w6/rev1/config.h b/keyboards/3w6/rev1/config.h new file mode 100644 index 0000000000..1f0bab97fa --- /dev/null +++ b/keyboards/3w6/rev1/config.h @@ -0,0 +1,63 @@ +/* +Copyright 2021 weteor + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +#pragma once + + +/* USB Device descriptor parameter */ +#define VENDOR_ID 0xFEED +#define PRODUCT_ID 0x4658 +#define DEVICE_VER 0x0001 +#define MANUFACTURER weteor +#define PRODUCT 3w6 + +/* key matrix size */ +#define MATRIX_ROWS 8 +#define MATRIX_COLS 10 + +#define MATRIX_ROWS_PER_SIDE (MATRIX_ROWS / 2) +#define MATRIX_COLS_PER_SIDE (MATRIX_COLS / 2) + +/* + * Keyboard Matrix Assignments + * + * Change this to how you wired your keyboard + * COLS: AVR pins used for columns, left to right + * ROWS: AVR pins used for rows, top to bottom + * DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode) + * ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode) + * + */ +#define MATRIX_ROW_PINS_L { B0, B1, B2, B4} +#define MATRIX_COL_PINS_L { B3, E6, F7, B6, B5 } +#define UNUSED_PINS_L { B7, C6, C7, D2, D3, D4, D5, D6, D7, F0, F1, F4, F5, F6 } + +#define MATRIX_ROW_PINS_R { P10, P11, P12, P05 } +#define MATRIX_COL_PINS_R { P06, P13, P14, P01, P00 } +#define UNUSED_PINS_R { P02, P03, P04, P07, P15, P16, P17 } + + +/* COL2ROW, ROW2COL */ +#define DIODE_DIRECTION COL2ROW + +/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */ +#define DEBOUNCE 5 + +/* disable these deprecated features by default */ +#define NO_ACTION_MACRO +#define NO_ACTION_FUNCTION + diff --git a/keyboards/3w6/rev1/matrix.c b/keyboards/3w6/rev1/matrix.c new file mode 100644 index 0000000000..7262fd22e6 --- /dev/null +++ b/keyboards/3w6/rev1/matrix.c @@ -0,0 +1,280 @@ +/* +Copyright 2013 Oleg Kostyuk <cub.uanic@gmail.com> + 2020 Pierre Chevalier <pierrechevalier83@gmail.com> + 2021 weteor + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +/* + * This code was heavily inspired by the ergodox_ez keymap, and modernized + * to take advantage of the quantum.h microcontroller agnostics gpio control + * abstractions and use the macros defined in config.h for the wiring as opposed + * to repeating that information all over the place. + */ + +#include QMK_KEYBOARD_H +#include "i2c_master.h" + +extern i2c_status_t tca9555_status; +#define I2C_TIMEOUT 1000 + +// I2C address: +// All address pins of the tca9555 are connected to the ground +// | 0 | 1 | 0 | 0 | A2 | A1 | A0 | +// | 0 | 1 | 0 | 0 | 0 | 0 | 0 | +#define I2C_ADDR 0b0100000 +#define I2C_ADDR_WRITE ((I2C_ADDR << 1) | I2C_WRITE) +#define I2C_ADDR_READ ((I2C_ADDR << 1) | I2C_READ) + +// Register addresses +#define IODIRA 0x06 // i/o direction register +#define IODIRB 0x07 +#define IREGP0 0x00 // GPIO pull-up resistor register +#define IREGP1 0x01 +#define OREGP0 0x02 // general purpose i/o port register (write modifies OLAT) +#define OREGP1 0x03 + +bool i2c_initialized = 0; +i2c_status_t tca9555_status = I2C_ADDR; + +uint8_t init_tca9555(void) { + print("starting init"); + tca9555_status = I2C_ADDR; + + // I2C subsystem + if (i2c_initialized == 0) { + i2c_init(); // on pins D(1,0) + i2c_initialized = true; + wait_ms(I2C_TIMEOUT); + } + + // set pin direction + // - unused : input : 1 + // - input : input : 1 + // - driving : output : 0 + tca9555_status = i2c_start(I2C_ADDR_WRITE, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(IODIRA, I2C_TIMEOUT); + if (tca9555_status) goto out; + // This means: write on pin 5 of port 0, read on rest + tca9555_status = i2c_write(0b11011111, I2C_TIMEOUT); + if (tca9555_status) goto out; + // This means: we will write on pins 0 to 2 on port 1. read rest + tca9555_status = i2c_write(0b11111000, I2C_TIMEOUT); + if (tca9555_status) goto out; + +out: + i2c_stop(); + return tca9555_status; +} + +/* matrix state(1:on, 0:off) */ +static matrix_row_t matrix[MATRIX_ROWS]; // debounced values + +static matrix_row_t read_cols(uint8_t row); +static void init_cols(void); +static void unselect_rows(void); +static void select_row(uint8_t row); + +static uint8_t tca9555_reset_loop; + +void matrix_init_custom(void) { + // initialize row and col + + tca9555_status = init_tca9555(); + + unselect_rows(); + init_cols(); + + // initialize matrix state: all keys off + for (uint8_t i = 0; i < MATRIX_ROWS; i++) { + matrix[i] = 0; + } +} + +void matrix_power_up(void) { + tca9555_status = init_tca9555(); + + unselect_rows(); + init_cols(); + + // initialize matrix state: all keys off + for (uint8_t i = 0; i < MATRIX_ROWS; i++) { + matrix[i] = 0; + } +} + +// Reads and stores a row, returning +// whether a change occurred. +static inline bool store_matrix_row(matrix_row_t current_matrix[], uint8_t index) { + matrix_row_t temp = read_cols(index); + if (current_matrix[index] != temp) { + current_matrix[index] = temp; + return true; + } + return false; +} + +bool matrix_scan_custom(matrix_row_t current_matrix[]) { + if (tca9555_status) { // if there was an error + if (++tca9555_reset_loop == 0) { + // since tca9555_reset_loop is 8 bit - we'll try to reset once in 255 matrix scans + // this will be approx bit more frequent than once per second + dprint("trying to reset tca9555\n"); + tca9555_status = init_tca9555(); + if (tca9555_status) { + dprint("right side not responding\n"); + } else { + dprint("right side attached\n"); + } + } + } + + bool changed = false; + for (uint8_t i = 0; i < MATRIX_ROWS_PER_SIDE; i++) { + // select rows from left and right hands + uint8_t left_index = i; + uint8_t right_index = i + MATRIX_ROWS_PER_SIDE; + select_row(left_index); + select_row(right_index); + + // we don't need a 30us delay anymore, because selecting a + // left-hand row requires more than 30us for i2c. + + changed |= store_matrix_row(current_matrix, left_index); + changed |= store_matrix_row(current_matrix, right_index); + + unselect_rows(); + } + + return changed; +} + +static void init_cols(void) { + // init on tca9555 + // not needed, already done as part of init_tca9555() + + // init on mcu + pin_t matrix_col_pins_mcu[MATRIX_COLS_PER_SIDE] = MATRIX_COL_PINS_L; + for (int pin_index = 0; pin_index < MATRIX_COLS_PER_SIDE; pin_index++) { + pin_t pin = matrix_col_pins_mcu[pin_index]; + setPinInput(pin); + writePinHigh(pin); + } +} + +static matrix_row_t read_cols(uint8_t row) { + if (row < MATRIX_ROWS_PER_SIDE) { + pin_t matrix_col_pins_mcu[MATRIX_COLS_PER_SIDE] = MATRIX_COL_PINS_L; + matrix_row_t current_row_value = 0; + // For each col... + for (uint8_t col_index = 0; col_index < MATRIX_COLS_PER_SIDE; col_index++) { + // Select the col pin to read (active low) + uint8_t pin_state = readPin(matrix_col_pins_mcu[col_index]); + + // Populate the matrix row with the state of the col pin + current_row_value |= pin_state ? 0 : (MATRIX_ROW_SHIFTER << col_index); + } + return current_row_value; + } else { + if (tca9555_status) { // if there was an error + return 0; + } else { + uint8_t data = 0; + uint8_t port0 = 0; + uint8_t port1 = 0; + tca9555_status = i2c_start(I2C_ADDR_WRITE, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(IREGP0, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_start(I2C_ADDR_READ, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_read_ack(I2C_TIMEOUT); + if (tca9555_status < 0) goto out; + port0 = (uint8_t)tca9555_status; + tca9555_status = i2c_read_nack(I2C_TIMEOUT); + if (tca9555_status < 0) goto out; + port1 = (uint8_t)tca9555_status; + + // The initial state was all ones and any depressed key at a given column for the currently selected row will have its bit flipped to zero. + // The return value is a row as represented in the generic matrix code were the rightmost bits represent the lower columns and zeroes represent non-depressed keys while ones represent depressed keys. + // Since the pins are not ordered sequentially, we have to build the correct dataset from the two ports. Refer to the schematic to see where every pin is connected. + data |= ( port0 & 0x01 ); + data |= ( port0 & 0x02 ); + data |= ( port1 & 0x10 ) >> 2; + data |= ( port1 & 0x08 ); + data |= ( port0 & 0x40 ) >> 2; + data = ~(data); + + tca9555_status = I2C_STATUS_SUCCESS; + out: + i2c_stop(); + return data; + } + } +} + +static void unselect_rows(void) { + // no need to unselect on tca9555, because the select step sets all + // the other row bits high, and it's not changing to a different + // direction + + // unselect rows on microcontroller + pin_t matrix_row_pins_mcu[MATRIX_ROWS_PER_SIDE] = MATRIX_ROW_PINS_L; + for (int pin_index = 0; pin_index < MATRIX_ROWS_PER_SIDE; pin_index++) { + pin_t pin = matrix_row_pins_mcu[pin_index]; + setPinInput(pin); + writePinLow(pin); + } +} + +static void select_row(uint8_t row) { + uint8_t port0 = 0xff; + uint8_t port1 = 0xff; + + if (row < MATRIX_ROWS_PER_SIDE) { + // select on atmega32u4 + pin_t matrix_row_pins_mcu[MATRIX_ROWS_PER_SIDE] = MATRIX_ROW_PINS_L; + pin_t pin = matrix_row_pins_mcu[row]; + setPinOutput(pin); + writePinLow(pin); + } else { + // select on tca9555 + if (tca9555_status) { // if there was an error + // do nothing + } else { + switch(row) { + case 4: port1 &= ~(1 << 0); break; + case 5: port1 &= ~(1 << 1); break; + case 6: port1 &= ~(1 << 2); break; + case 7: port0 &= ~(1 << 5); break; + default: break; + } + + tca9555_status = i2c_start(I2C_ADDR_WRITE, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(OREGP0, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(port0, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(port1, I2C_TIMEOUT); + if (tca9555_status) goto out; + // Select the desired row by writing a byte for the entire GPIOB bus where only the bit representing the row we want to select is a zero (write instruction) and every other bit is a one. + // Note that the row - MATRIX_ROWS_PER_SIDE reflects the fact that being on the right hand, the columns are numbered from MATRIX_ROWS_PER_SIDE to MATRIX_ROWS, but the pins we want to write to are indexed from zero up on the GPIOB bus. + out: + i2c_stop(); + } + } +} diff --git a/keyboards/3w6/rev1/readme.md b/keyboards/3w6/rev1/readme.md new file mode 100644 index 0000000000..4d806f9222 --- /dev/null +++ b/keyboards/3w6/rev1/readme.md @@ -0,0 +1,32 @@ +# 3W6 + + +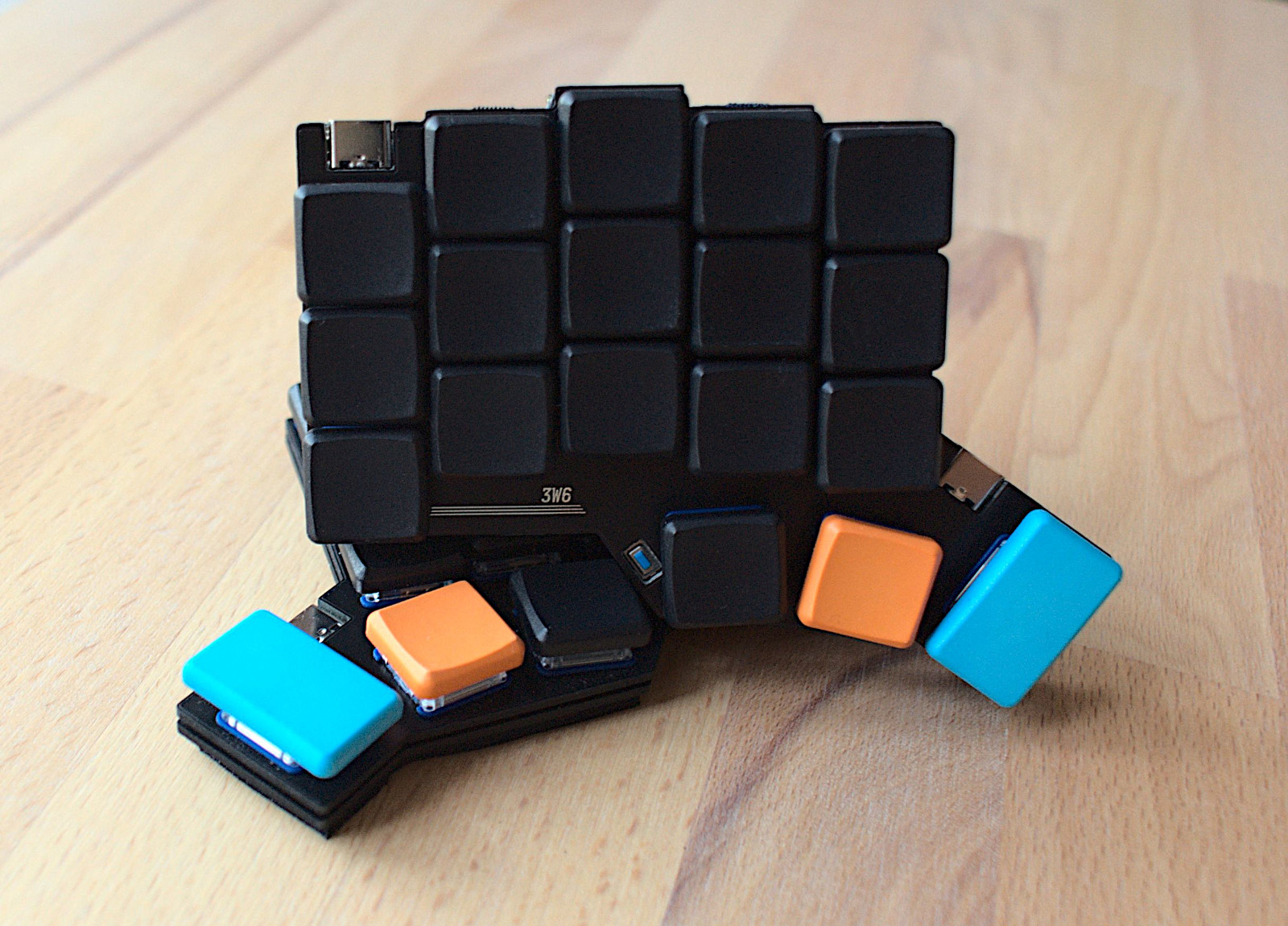 + +The 3w6 is a low profile, split ortholinear keyboard with 36 keys. + +* Rev1: + - onboard microcontroller (ATMega32U4) + - USB-C connector Board <-> PC + - USB-C connectors between both split halfs + - choc spacing (18x17mm) + - aggressive pinky stagger + - support for Choc V1 switches + +--- + +* Keyboard Maintainer: [weteor](https://github.com/weteor) +* Hardware Supported: + * 3w6 rev1 +* Hardware Availability (this is an older version, current revision is rev2): + * make one yourself: [Design and Productionfiles](https://github.com/weteor/3w6) +--- +To reach the bootloader, connect the board to the PC and push the reset button on left half. + +Make examples for this keyboard (after setting up your build environment): + + make 3w6/rev1:default + + --- + +See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs). diff --git a/keyboards/3w6/rev1/rev1.c b/keyboards/3w6/rev1/rev1.c new file mode 100644 index 0000000000..3944ec3b13 --- /dev/null +++ b/keyboards/3w6/rev1/rev1.c @@ -0,0 +1,17 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#include "rev1.h" diff --git a/keyboards/3w6/rev1/rev1.h b/keyboards/3w6/rev1/rev1.h new file mode 100644 index 0000000000..ba881ca431 --- /dev/null +++ b/keyboards/3w6/rev1/rev1.h @@ -0,0 +1,44 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "quantum.h" + +/* This is a shortcut to help you visually see your layout. + * + * The first section contains all of the arguments representing the physical + * layout of the board and position of the keys. + * + * The second converts the arguments into a two-dimensional array which + * represents the switch matrix. + */ +#define LAYOUT( \ + k00, k01, k02, k03, k04, k05, k06, k07, k08, k09,\ + k10, k11, k12, k13, k14, k15, k16, k17, k18, k19,\ + k20, k21, k22, k23, k24, k25, k26, k27, k28, k29,\ + k32, k33, k34, k35, k36, k37\ +) { \ + { k00, k01, k02, k03, k04 }, \ + { k10, k11, k12, k13, k14 }, \ + { k20, k21, k22, k23, k24 }, \ + { KC_NO, KC_NO, k32, k33, k34 }, \ + \ + { k05, k06, k07, k08, k09 }, \ + { k15, k16, k17, k18, k19 }, \ + { k25, k26, k27, k28, k29 }, \ + { k35, k36, k37, KC_NO, KC_NO }, \ +} diff --git a/keyboards/3w6/rev1/rules.mk b/keyboards/3w6/rev1/rules.mk new file mode 100644 index 0000000000..d4876dde77 --- /dev/null +++ b/keyboards/3w6/rev1/rules.mk @@ -0,0 +1,29 @@ +# MCU name +MCU = atmega32u4 + +# Bootloader selection +BOOTLOADER = atmel-dfu + +# Build Options +# change yes to no to disable +# +BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration +MOUSEKEY_ENABLE = yes # Mouse keys +EXTRAKEY_ENABLE = yes # Audio control and System control +CONSOLE_ENABLE = no # Console for debug +COMMAND_ENABLE = no # Commands for debug and configuration +# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE +SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend +# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work +NKRO_ENABLE = no # USB Nkey Rollover +BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality +RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow +BLUETOOTH_ENABLE = no # Enable Bluetooth +AUDIO_ENABLE = no # Audio output +UNICODE_ENABLE = yes +CUSTOM_MATRIX = lite +NO_USB_STARTUP_CHECK = yes +LTO_ENABLE = no + +SRC += matrix.c +QUANTUM_LIB_SRC += i2c_master.c diff --git a/keyboards/3w6/rev2/config.h b/keyboards/3w6/rev2/config.h new file mode 100644 index 0000000000..d191360607 --- /dev/null +++ b/keyboards/3w6/rev2/config.h @@ -0,0 +1,63 @@ +/* +Copyright 2021 weteor + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +#pragma once + + +/* USB Device descriptor parameter */ +#define VENDOR_ID 0xFEED +#define PRODUCT_ID 0x4658 +#define DEVICE_VER 0x0002 +#define MANUFACTURER weteor +#define PRODUCT 3w6 + +/* key matrix size */ +#define MATRIX_ROWS 8 +#define MATRIX_COLS 10 + +#define MATRIX_ROWS_PER_SIDE (MATRIX_ROWS / 2) +#define MATRIX_COLS_PER_SIDE (MATRIX_COLS / 2) + +/* + * Keyboard Matrix Assignments + * + * Change this to how you wired your keyboard + * COLS: AVR pins used for columns, left to right + * ROWS: AVR pins used for rows, top to bottom + * DIODE_DIRECTION: COL2ROW = COL = Anode (+), ROW = Cathode (-, marked on diode) + * ROW2COL = ROW = Anode (+), COL = Cathode (-, marked on diode) + * + */ +#define MATRIX_ROW_PINS_L { B0, B1, B2, B4} +#define MATRIX_COL_PINS_L { B3, E6, F7, B6, B5 } +#define UNUSED_PINS_L { B7, C6, C7, D2, D3, D4, D5, D6, D7, F0, F1, F4, F5, F6 } + +#define MATRIX_ROW_PINS_R { P10, P11, P12, P05 } +#define MATRIX_COL_PINS_R { P06, P13, P14, P01, P00 } +#define UNUSED_PINS_R { P02, P03, P04, P07, P15, P16, P17 } + + +/* COL2ROW, ROW2COL */ +#define DIODE_DIRECTION COL2ROW + +/* Debounce reduces chatter (unintended double-presses) - set 0 if debouncing is not needed */ +#define DEBOUNCE 5 + +/* disable these deprecated features by default */ +#define NO_ACTION_MACRO +#define NO_ACTION_FUNCTION + diff --git a/keyboards/3w6/rev2/keymaps/default_pimoroni/config.h b/keyboards/3w6/rev2/keymaps/default_pimoroni/config.h new file mode 100644 index 0000000000..45c9d5154e --- /dev/null +++ b/keyboards/3w6/rev2/keymaps/default_pimoroni/config.h @@ -0,0 +1,21 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#define PIMORONI_TRACKBALL_INVERT_Y +#define PIMORONI_TRACKBALL_ROTATE + diff --git a/keyboards/3w6/rev2/keymaps/default_pimoroni/keymap.c b/keyboards/3w6/rev2/keymaps/default_pimoroni/keymap.c new file mode 100644 index 0000000000..a5b8c6006a --- /dev/null +++ b/keyboards/3w6/rev2/keymaps/default_pimoroni/keymap.c @@ -0,0 +1,70 @@ +/* +Copyright 2021 weteor + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +#include QMK_KEYBOARD_H + +enum layers +{ + _ALPHA_QWERTY = 0, + _ALPHA_COLEMAK, + _SYM, + _NAV, + _NUM, + _CFG, +}; + +const uint16_t PROGMEM keymaps[][MATRIX_ROWS][MATRIX_COLS] = { + + +[_ALPHA_QWERTY] = LAYOUT( + KC_Q, KC_W, KC_E, KC_R, KC_T, KC_Y, KC_U, KC_I, KC_O, KC_P, + KC_A, KC_S, KC_D, KC_F, KC_G, KC_H, KC_J, KC_K, KC_L, KC_SCLN, + LSFT_T(KC_Z), KC_X, KC_C, KC_V, KC_B, KC_N, KC_M, KC_COMM, KC_DOT, RSFT_T(KC_SLSH), + + LCTL_T(KC_ESC), LT(_NUM,KC_SPC), LT(_NAV, KC_TAB), LT(_SYM, KC_BSPC), KC_ENT, LALT_T(KC_DEL) + ), + [_ALPHA_COLEMAK] = LAYOUT( + KC_Q, KC_W, KC_F, KC_P, KC_G, KC_J, KC_L, KC_U, KC_Y, KC_QUOT, + KC_A, KC_R, KC_S, KC_T, KC_D, KC_H, KC_N, KC_E, KC_I, KC_O, + LSFT_T(KC_Z), KC_X, KC_C, KC_V, KC_B, KC_K, KC_M, KC_COMM, KC_DOT, RSFT_T(KC_SCLN), + LCTL_T(KC_ENT), LT(_NUM,KC_SPC), LT(_NAV, KC_TAB), LT(_SYM, KC_BSPC), KC_ENT, LALT_T(KC_DEL) + ), + [_SYM] = LAYOUT( + KC_GRV , KC_CIRC, KC_AT, KC_DLR, KC_TILD, KC_AMPR, KC_EXLM, KC_PIPE, KC_UNDS, KC_HASH, + KC_SLSH, KC_LBRC, KC_LCBR, KC_LPRN, KC_EQL, KC_ASTR, KC_RPRN, KC_RCBR, KC_RBRC, KC_BSLS, + _______, KC_QUES, KC_PLUS, KC_PERC, XXXXXXX, XXXXXXX, XXXXXXX, KC_MINS, XXXXXXX, _______, + XXXXXXX, MO(_CFG), XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX + ), + [_NAV] = LAYOUT( + XXXXXXX, KC_VOLD, KC_MUTE, KC_VOLU, XXXXXXX, XXXXXXX, KC_PGDN, KC_UP, KC_PGUP, KC_DEL, + KC_MPRV, KC_MPLY, KC_MSTP, KC_MNXT, XXXXXXX, KC_HOME, KC_LEFT, KC_DOWN, KC_RGHT, KC_END, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, MO(_CFG), XXXXXXX + ), + [_NUM] = LAYOUT( + XXXXXXX, KC_F9, KC_F10, KC_F11, KC_F12, KC_PPLS, KC_P7, KC_P8, KC_P9, KC_PSLS, + XXXXXXX, KC_F5, KC_F6, KC_F7, KC_F8, KC_P0, KC_P4, KC_P5, KC_P6, KC_PDOT, + XXXXXXX, KC_F1, KC_F2, KC_F3, KC_F4, KC_PMNS, KC_P1, KC_P2, KC_P3, KC_PAST, + XXXXXXX, XXXXXXX, XXXXXXX, KC_PEQL, KC_PENT, XXXXXXX + ), + [_CFG] = LAYOUT( + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX,DF(_ALPHA_QWERTY), DF(_ALPHA_COLEMAK), + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, + XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX, XXXXXXX + ), +}; diff --git a/keyboards/3w6/rev2/keymaps/default_pimoroni/pimoroni_trackball.c b/keyboards/3w6/rev2/keymaps/default_pimoroni/pimoroni_trackball.c new file mode 100644 index 0000000000..c4f4a0441a --- /dev/null +++ b/keyboards/3w6/rev2/keymaps/default_pimoroni/pimoroni_trackball.c @@ -0,0 +1,177 @@ +/* Copyright 2020 Christopher Courtney, aka Drashna Jael're (@drashna) <drashna@live.com> + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#include "pimoroni_trackball.h" +#include "i2c_master.h" + +static uint8_t scrolling = 0; +static int16_t x_offset = 0; +static int16_t y_offset = 0; +static int16_t h_offset = 0; +static int16_t v_offset = 0; +static float precisionSpeed = 1; + +static uint16_t i2c_timeout_timer; + +#ifndef I2C_TIMEOUT +# define I2C_TIMEOUT 100 +#endif +#ifndef I2C_WAITCHECK +# define I2C_WAITCHECK 1000 +#endif +#ifndef MOUSE_DEBOUNCE +# define MOUSE_DEBOUNCE 5 +#endif + +void trackball_set_rgbw(uint8_t red, uint8_t green, uint8_t blue, uint8_t white) { + uint8_t data[] = {0x00, red, green, blue, white}; + i2c_transmit(TRACKBALL_WRITE, data, sizeof(data), I2C_TIMEOUT); +} + +int16_t mouse_offset(uint8_t positive, uint8_t negative, int16_t scale) { + int16_t offset = (int16_t)positive - (int16_t)negative; + int16_t magnitude = (int16_t)(scale * offset * offset * precisionSpeed); + return offset < 0 ? -magnitude : magnitude; +} + +void update_member(int8_t* member, int16_t* offset) { + if (*offset > 127) { + *member = 127; + *offset -= 127; + } else if (*offset < -127) { + *member = -127; + *offset += 127; + } else { + *member = *offset; + *offset = 0; + } +} + +__attribute__((weak)) void trackball_check_click(bool pressed, report_mouse_t* mouse) { + if (pressed) { + mouse->buttons |= MOUSE_BTN1; + } else { + mouse->buttons &= ~MOUSE_BTN1; + } +} + +bool process_record_kb(uint16_t keycode, keyrecord_t* record) { + if (true) { + xprintf("KL: kc: %u, col: %u, row: %u, pressed: %u\n", keycode, record->event.key.col, record->event.key.row, record->event.pressed); + } + + + if (!process_record_user(keycode, record)) { return false; } + +/* If Mousekeys is disabled, then use handle the mouse button + * keycodes. This makes things simpler, and allows usage of + * the keycodes in a consistent manner. But only do this if + * Mousekeys is not enable, so it's not handled twice. + */ +#ifndef MOUSEKEY_ENABLE + if (IS_MOUSEKEY_BUTTON(keycode)) { + report_mouse_t currentReport = pointing_device_get_report(); + if (record->event.pressed) { + currentReport.buttons |= 1 << (keycode - KC_MS_BTN1); + } else { + currentReport.buttons &= ~(1 << (keycode - KC_MS_BTN1)); + } + pointing_device_set_report(currentReport); + pointing_device_send(); + } +#endif + + return true; +} + +void trackball_register_button(bool pressed, enum mouse_buttons button) { + report_mouse_t currentReport = pointing_device_get_report(); + if (pressed) { + currentReport.buttons |= button; + } else { + currentReport.buttons &= ~button; + } + pointing_device_set_report(currentReport); +} + +float trackball_get_precision(void) { return precisionSpeed; } +void trackball_set_precision(float precision) { precisionSpeed = precision; } +bool trackball_is_scrolling(void) { return scrolling; } +void trackball_set_scrolling(bool scroll) { scrolling = scroll; } + + +__attribute__((weak)) void pointing_device_init(void) { trackball_set_rgbw(0x80, 0x00, 0x00, 0x00); } + +void pointing_device_task(void) { + static bool debounce; + static uint16_t debounce_timer; + uint8_t state[5] = {}; + if (timer_elapsed(i2c_timeout_timer) > I2C_WAITCHECK) { + if (i2c_readReg(TRACKBALL_WRITE, 0x04, state, 5, I2C_TIMEOUT) == I2C_STATUS_SUCCESS) { + if (!state[4] && !debounce) { + if (scrolling) { +#ifdef PIMORONI_TRACKBALL_INVERT_X + h_offset += mouse_offset(state[2], state[3], 1); +#else + h_offset -= mouse_offset(state[2], state[3], 1); +#endif +#ifdef PIMORONI_TRACKBALL_INVERT_Y + v_offset += mouse_offset(state[1], state[0], 1); +#else + v_offset -= mouse_offset(state[1], state[0], 1); +#endif + } else { +#ifdef PIMORONI_TRACKBALL_INVERT_X + x_offset -= mouse_offset(state[2], state[3], 5); +#else + x_offset += mouse_offset(state[2], state[3], 5); +#endif +#ifdef PIMORONI_TRACKBALL_INVERT_Y + y_offset -= mouse_offset(state[1], state[0], 5); +#else + y_offset += mouse_offset(state[1], state[0], 5); +#endif + } + } else { + if (state[4]) { + debounce = true; + debounce_timer = timer_read(); + } + } + } else { + i2c_timeout_timer = timer_read(); + } + } + + if (timer_elapsed(debounce_timer) > MOUSE_DEBOUNCE) debounce = false; + + report_mouse_t mouse = pointing_device_get_report(); + // trackball_check_click(state[4] & (1 << 7), &mouse); + +#ifndef PIMORONI_TRACKBALL_ROTATE + update_member(&mouse.x, &x_offset); + update_member(&mouse.y, &y_offset); + update_member(&mouse.h, &h_offset); + update_member(&mouse.v, &v_offset); +#else + update_member(&mouse.x, &y_offset); + update_member(&mouse.y, &x_offset); + update_member(&mouse.h, &v_offset); + update_member(&mouse.v, &h_offset); +#endif + pointing_device_set_report(mouse); + pointing_device_send(); +} diff --git a/keyboards/3w6/rev2/keymaps/default_pimoroni/pimoroni_trackball.h b/keyboards/3w6/rev2/keymaps/default_pimoroni/pimoroni_trackball.h new file mode 100644 index 0000000000..cfcd5a47a1 --- /dev/null +++ b/keyboards/3w6/rev2/keymaps/default_pimoroni/pimoroni_trackball.h @@ -0,0 +1,35 @@ +/* Copyright 2020 Christopher Courtney, aka Drashna Jael're (@drashna) <drashna@live.com> + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "quantum.h" +#include "pointing_device.h" + +#ifndef TRACKBALL_ADDRESS +# define TRACKBALL_ADDRESS 0x0A +#endif +#define TRACKBALL_WRITE ((TRACKBALL_ADDRESS << 1) | I2C_WRITE) +#define TRACKBALL_READ ((TRACKBALL_ADDRESS << 1) | I2C_READ) + +void trackball_set_rgbw(uint8_t red, uint8_t green, uint8_t blue, uint8_t white); +void trackball_check_click(bool pressed, report_mouse_t *mouse); +void trackball_register_button(bool pressed, enum mouse_buttons button); + +float trackball_get_precision(void); +void trackball_set_precision(float precision); +bool trackball_is_scrolling(void); +void trackball_set_scrolling(bool scroll);
\ No newline at end of file diff --git a/keyboards/3w6/rev2/keymaps/default_pimoroni/rules.mk b/keyboards/3w6/rev2/keymaps/default_pimoroni/rules.mk new file mode 100644 index 0000000000..231a883719 --- /dev/null +++ b/keyboards/3w6/rev2/keymaps/default_pimoroni/rules.mk @@ -0,0 +1,3 @@ +POINTING_DEVICE_ENABLE = yes +SRC += pimoroni_trackball.c +MOUSEKEY_ENABLE = no diff --git a/keyboards/3w6/rev2/matrix.c b/keyboards/3w6/rev2/matrix.c new file mode 100644 index 0000000000..5bc967bedd --- /dev/null +++ b/keyboards/3w6/rev2/matrix.c @@ -0,0 +1,275 @@ +/* +Copyright 2013 Oleg Kostyuk <cub.uanic@gmail.com> + 2020 Pierre Chevalier <pierrechevalier83@gmail.com> + 2021 weteor + +This program is free software: you can redistribute it and/or modify +it under the terms of the GNU General Public License as published by +the Free Software Foundation, either version 2 of the License, or +(at your option) any later version. + +This program is distributed in the hope that it will be useful, +but WITHOUT ANY WARRANTY; without even the implied warranty of +MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the +GNU General Public License for more details. + +You should have received a copy of the GNU General Public License +along with this program. If not, see <http://www.gnu.org/licenses/>. +*/ + +/* + * This code was heavily inspired by the ergodox_ez keymap, and modernized + * to take advantage of the quantum.h microcontroller agnostics gpio control + * abstractions and use the macros defined in config.h for the wiring as opposed + * to repeating that information all over the place. + */ + +#include QMK_KEYBOARD_H +#include "i2c_master.h" + +extern i2c_status_t tca9555_status; +#define I2C_TIMEOUT 1000 + +// I2C address: +// All address pins of the tca9555 are connected to the ground +// | 0 | 1 | 0 | 0 | A2 | A1 | A0 | +// | 0 | 1 | 0 | 0 | 0 | 0 | 0 | +#define I2C_ADDR 0b0100000 +#define I2C_ADDR_WRITE ((I2C_ADDR << 1) | I2C_WRITE) +#define I2C_ADDR_READ ((I2C_ADDR << 1) | I2C_READ) + +// Register addresses +#define IODIRA 0x06 // i/o direction register +#define IODIRB 0x07 +#define IREGP0 0x00 // GPIO pull-up resistor register +#define IREGP1 0x01 +#define OREGP0 0x02 // general purpose i/o port register (write modifies OLAT) +#define OREGP1 0x03 + +bool i2c_initialized = 0; +i2c_status_t tca9555_status = I2C_ADDR; + +uint8_t init_tca9555(void) { + print("starting init"); + tca9555_status = I2C_ADDR; + + // I2C subsystem + if (i2c_initialized == 0) { + i2c_init(); // on pins D(1,0) + i2c_initialized = true; + wait_ms(I2C_TIMEOUT); + } + + // set pin direction + // - unused : input : 1 + // - input : input : 1 + // - driving : output : 0 + tca9555_status = i2c_start(I2C_ADDR_WRITE, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(IODIRA, I2C_TIMEOUT); + if (tca9555_status) goto out; + // This means: read all pins of port 0 + tca9555_status = i2c_write(0b11111111, I2C_TIMEOUT); + if (tca9555_status) goto out; + // This means: we will write on pins 0 to 3 on port 1. read rest + tca9555_status = i2c_write(0b11110000, I2C_TIMEOUT); + if (tca9555_status) goto out; + +out: + i2c_stop(); + return tca9555_status; +} + +/* matrix state(1:on, 0:off) */ +static matrix_row_t matrix[MATRIX_ROWS]; // debounced values + +static matrix_row_t read_cols(uint8_t row); +static void init_cols(void); +static void unselect_rows(void); +static void select_row(uint8_t row); + +static uint8_t tca9555_reset_loop; + +void matrix_init_custom(void) { + // initialize row and col + + tca9555_status = init_tca9555(); + + unselect_rows(); + init_cols(); + + // initialize matrix state: all keys off + for (uint8_t i = 0; i < MATRIX_ROWS; i++) { + matrix[i] = 0; + } +} + +void matrix_power_up(void) { + tca9555_status = init_tca9555(); + + unselect_rows(); + init_cols(); + + // initialize matrix state: all keys off + for (uint8_t i = 0; i < MATRIX_ROWS; i++) { + matrix[i] = 0; + } +} + +// Reads and stores a row, returning +// whether a change occurred. +static inline bool store_matrix_row(matrix_row_t current_matrix[], uint8_t index) { + matrix_row_t temp = read_cols(index); + if (current_matrix[index] != temp) { + current_matrix[index] = temp; + return true; + } + return false; +} + +bool matrix_scan_custom(matrix_row_t current_matrix[]) { + if (tca9555_status) { // if there was an error + if (++tca9555_reset_loop == 0) { + // since tca9555_reset_loop is 8 bit - we'll try to reset once in 255 matrix scans + // this will be approx bit more frequent than once per second + dprint("trying to reset tca9555\n"); + tca9555_status = init_tca9555(); + if (tca9555_status) { + dprint("right side not responding\n"); + } else { + dprint("right side attached\n"); + } + } + } + + bool changed = false; + for (uint8_t i = 0; i < MATRIX_ROWS_PER_SIDE; i++) { + // select rows from left and right hands + uint8_t left_index = i; + uint8_t right_index = i + MATRIX_ROWS_PER_SIDE; + select_row(left_index); + select_row(right_index); + + // we don't need a 30us delay anymore, because selecting a + // left-hand row requires more than 30us for i2c. + + changed |= store_matrix_row(current_matrix, left_index); + changed |= store_matrix_row(current_matrix, right_index); + + unselect_rows(); + } + + return changed; +} + +static void init_cols(void) { + // init on tca9555 + // not needed, already done as part of init_tca9555() + + // init on mcu + pin_t matrix_col_pins_mcu[MATRIX_COLS_PER_SIDE] = MATRIX_COL_PINS_L; + for (int pin_index = 0; pin_index < MATRIX_COLS_PER_SIDE; pin_index++) { + pin_t pin = matrix_col_pins_mcu[pin_index]; + setPinInput(pin); + writePinHigh(pin); + } +} + +static matrix_row_t read_cols(uint8_t row) { + if (row < MATRIX_ROWS_PER_SIDE) { + pin_t matrix_col_pins_mcu[MATRIX_COLS_PER_SIDE] = MATRIX_COL_PINS_L; + matrix_row_t current_row_value = 0; + // For each col... + for (uint8_t col_index = 0; col_index < MATRIX_COLS_PER_SIDE; col_index++) { + // Select the col pin to read (active low) + uint8_t pin_state = readPin(matrix_col_pins_mcu[col_index]); + + // Populate the matrix row with the state of the col pin + current_row_value |= pin_state ? 0 : (MATRIX_ROW_SHIFTER << col_index); + } + return current_row_value; + } else { + if (tca9555_status) { // if there was an error + return 0; + } else { + uint8_t data = 0; + uint8_t port0 = 0; + tca9555_status = i2c_start(I2C_ADDR_WRITE, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(IREGP0, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_start(I2C_ADDR_READ, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_read_nack(I2C_TIMEOUT); + if (tca9555_status < 0) goto out; + + port0 = ~(uint8_t)tca9555_status; + + // We read all the pins on GPIOA. + // The initial state was all ones and any depressed key at a given column for the currently selected row will have its bit flipped to zero. + // The return value is a row as represented in the generic matrix code were the rightmost bits represent the lower columns and zeroes represent non-depressed keys while ones represent depressed keys. + // the pins connected to eact columns are sequential, but in reverse order, and counting from zero down (col 5 -> GPIO04, col6 -> GPIO03 and so on). + data |= ( port0 & 0x01 ) << 4; + data |= ( port0 & 0x02 ) << 2; + data |= ( port0 & 0x04 ); + data |= ( port0 & 0x08 ) >> 2; + data |= ( port0 & 0x10 ) >> 4; + + tca9555_status = I2C_STATUS_SUCCESS; + out: + i2c_stop(); + + return data; + } + } +} + +static void unselect_rows(void) { + // no need to unselect on tca9555, because the select step sets all + // the other row bits high, and it's not changing to a different + // direction + + // unselect rows on microcontroller + pin_t matrix_row_pins_mcu[MATRIX_ROWS_PER_SIDE] = MATRIX_ROW_PINS_L; + for (int pin_index = 0; pin_index < MATRIX_ROWS_PER_SIDE; pin_index++) { + pin_t pin = matrix_row_pins_mcu[pin_index]; + setPinInput(pin); + writePinLow(pin); + } +} + +static void select_row(uint8_t row) { + uint8_t port1 = 0xff; + + if (row < MATRIX_ROWS_PER_SIDE) { + // select on atmega32u4 + pin_t matrix_row_pins_mcu[MATRIX_ROWS_PER_SIDE] = MATRIX_ROW_PINS_L; + pin_t pin = matrix_row_pins_mcu[row]; + setPinOutput(pin); + writePinLow(pin); + } else { + // select on tca9555 + if (tca9555_status) { // if there was an error + // do nothing + } else { + switch(row) { + case 4: port1 &= ~(1 << 0); break; + case 5: port1 &= ~(1 << 1); break; + case 6: port1 &= ~(1 << 2); break; + case 7: port1 &= ~(1 << 3); break; + default: break; + } + + // Select the desired row by writing a byte for the entire GPIOB bus where only the bit representing the row we want to select is a zero (write instruction) and every other bit is a one. + // Note that the row - MATRIX_ROWS_PER_SIDE reflects the fact that being on the right hand, the columns are numbered from MATRIX_ROWS_PER_SIDE to MATRIX_ROWS, but the pins we want to write to are indexed from zero up on the GPIOB bus. + tca9555_status = i2c_start(I2C_ADDR_WRITE, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(OREGP1, I2C_TIMEOUT); + if (tca9555_status) goto out; + tca9555_status = i2c_write(port1, I2C_TIMEOUT); + if (tca9555_status) goto out; + out: + i2c_stop(); + } + } +} diff --git a/keyboards/3w6/rev2/readme.md b/keyboards/3w6/rev2/readme.md new file mode 100644 index 0000000000..a17c2fd6be --- /dev/null +++ b/keyboards/3w6/rev2/readme.md @@ -0,0 +1,38 @@ +# 3W6 + + + + +The 3w6 is a low profile, split ortholinear keyboard with 36 keys. + +* Rev2: + - onboard microcontroller (ATMega32U4) + - USB-C connector Board <-> PC + - USB-C connectors between both split halfs + - choc spacing (18x17mm) + - aggressive pinky stagger + - support for Choc V1 switches + - files for midplate (1.6 to 2mm) + - support for [Pimoroni Trackball](https://shop.pimoroni.com/products/trackball-breakout) instead of outer thumb switch on right half, needs midplate + - mounting holes for [Tenting Puck](https://splitkb.com/collections/keyboard-parts/products/tenting-puck), only usable without mid or switchplate + +--- + +* Keyboard Maintainer: [weteor](https://github.com/weteor) +* Hardware Supported: + * 3w6 rev2 (with Pimoroni support) +* Hardware Availability: + * make one yourself: [Design and Productionfiles](https://github.com/weteor/3w6) + * maintainer is selling kits when available + +--- +To reach the bootloader, connect the board to the PC and push the reset button on left half. + +Make examples for this keyboard (after setting up your build environment): + + make 3w6/rev2:default + make 3w6/rev2:default_pimoroni + + --- + +See the [build environment setup](https://docs.qmk.fm/#/getting_started_build_tools) and the [make instructions](https://docs.qmk.fm/#/getting_started_make_guide) for more information. Brand new to QMK? Start with our [Complete Newbs Guide](https://docs.qmk.fm/#/newbs). diff --git a/keyboards/3w6/rev2/rev2.c b/keyboards/3w6/rev2/rev2.c new file mode 100644 index 0000000000..17bfb9b8a7 --- /dev/null +++ b/keyboards/3w6/rev2/rev2.c @@ -0,0 +1,17 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#include "rev2.h" diff --git a/keyboards/3w6/rev2/rev2.h b/keyboards/3w6/rev2/rev2.h new file mode 100644 index 0000000000..ba881ca431 --- /dev/null +++ b/keyboards/3w6/rev2/rev2.h @@ -0,0 +1,44 @@ +/* Copyright 2021 weteor + * + * This program is free software: you can redistribute it and/or modify + * it under the terms of the GNU General Public License as published by + * the Free Software Foundation, either version 2 of the License, or + * (at your option) any later version. + * + * This program is distributed in the hope that it will be useful, + * but WITHOUT ANY WARRANTY; without even the implied warranty of + * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the + * GNU General Public License for more details. + * + * You should have received a copy of the GNU General Public License + * along with this program. If not, see <http://www.gnu.org/licenses/>. + */ + +#pragma once + +#include "quantum.h" + +/* This is a shortcut to help you visually see your layout. + * + * The first section contains all of the arguments representing the physical + * layout of the board and position of the keys. + * + * The second converts the arguments into a two-dimensional array which + * represents the switch matrix. + */ +#define LAYOUT( \ + k00, k01, k02, k03, k04, k05, k06, k07, k08, k09,\ + k10, k11, k12, k13, k14, k15, k16, k17, k18, k19,\ + k20, k21, k22, k23, k24, k25, k26, k27, k28, k29,\ + k32, k33, k34, k35, k36, k37\ +) { \ + { k00, k01, k02, k03, k04 }, \ + { k10, k11, k12, k13, k14 }, \ + { k20, k21, k22, k23, k24 }, \ + { KC_NO, KC_NO, k32, k33, k34 }, \ + \ + { k05, k06, k07, k08, k09 }, \ + { k15, k16, k17, k18, k19 }, \ + { k25, k26, k27, k28, k29 }, \ + { k35, k36, k37, KC_NO, KC_NO }, \ +} diff --git a/keyboards/3w6/rev2/rules.mk b/keyboards/3w6/rev2/rules.mk new file mode 100644 index 0000000000..d4876dde77 --- /dev/null +++ b/keyboards/3w6/rev2/rules.mk @@ -0,0 +1,29 @@ +# MCU name +MCU = atmega32u4 + +# Bootloader selection +BOOTLOADER = atmel-dfu + +# Build Options +# change yes to no to disable +# +BOOTMAGIC_ENABLE = no # Virtual DIP switch configuration +MOUSEKEY_ENABLE = yes # Mouse keys +EXTRAKEY_ENABLE = yes # Audio control and System control +CONSOLE_ENABLE = no # Console for debug +COMMAND_ENABLE = no # Commands for debug and configuration +# Do not enable SLEEP_LED_ENABLE. it uses the same timer as BACKLIGHT_ENABLE +SLEEP_LED_ENABLE = no # Breathing sleep LED during USB suspend +# if this doesn't work, see here: https://github.com/tmk/tmk_keyboard/wiki/FAQ#nkro-doesnt-work +NKRO_ENABLE = no # USB Nkey Rollover +BACKLIGHT_ENABLE = no # Enable keyboard backlight functionality +RGBLIGHT_ENABLE = no # Enable keyboard RGB underglow +BLUETOOTH_ENABLE = no # Enable Bluetooth +AUDIO_ENABLE = no # Audio output +UNICODE_ENABLE = yes +CUSTOM_MATRIX = lite +NO_USB_STARTUP_CHECK = yes +LTO_ENABLE = no + +SRC += matrix.c +QUANTUM_LIB_SRC += i2c_master.c |